
Written by: Fickrie Muhammad, M.Sc.
Lecturer at Hydrography Research Group, Faculty of Earth Sciences and Technology, Insitut Teknologi Bandung
PhD Candidate at Geodesy and Geomatics Study Programme, Institut Teknologi Bandung and HafenCity University Hamburg
Introduction
The recent incident involving the exploration of the Titan submarine by OceanGate Inc has garnered significant attention worldwide. This event has been analyzed from various perspectives, including its political and socio-economic implications, particularly in light of the exorbitant cost associated with the endeavor, amounting to $250,000 per person. OceanGate Inc named their submersible vehicle the “Titan Sub,” a name presumably inspired by the historical Titanic Submersible. The company, known as OceanGate Expeditions, was established by Stockton Rush in 2009 with the primary objective of exploring the emerging underwater tourism market.
OceanGate Expeditions has conducted numerous dives for research purposes, as outlined in legal documents attributed to the organization (OceanGate, 2023). These research activities have encompassed diverse areas, such as the collection and analysis of environmental DNA underwater. Various recorded footage of these research and exploration missions were previously accessible through social media platforms and the OceanGate Expeditions website (https://oceangateexpeditions.com/), including platforms like YouTube and Instagram. However, subsequent to the aforementioned incident, these online sources were suspended and the content was removed. The most recent mission undertaken by OceanGate Expeditions involved the exploration of the wreckage of the R.M.S Titanic, situated in the Atlantic Ocean. Departing from St. John’s, Newfoundland in early May 2023, this expedition sought to uncover new insights into the historical site (OceanGate, 2023), as depicted in Figure 1.
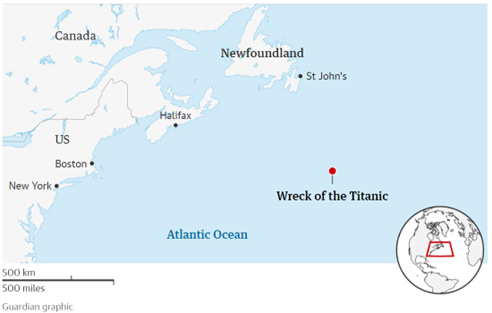
Figure 1. The location of Titan Sub mission (The Guardian, 2023)
The primary objective of the OceanGate Inc. exploration mission is to closely examine the wreckage of the R.M.S. Titanic, necessitating the utilization of the Titan submersible, for diving to depths of approximately 3,800 meters. As the submersible descends to greater depths, the properties of water undergo significant alterations, prompting an investigation into the relationship between water depth and its corresponding properties. Temperature, salinity, pressure, and density are among the most utilized parameters for defining water characteristics, with each of these parameters exhibiting interdependencies. Consequently, the submersible must be equipped with a robust engineering framework to effectively navigate the dynamic changes in water properties encountered throughout its descent where the general overview design of the Titan is shown in Figure 2.

Figure 2. Illustration of Titan Sub design (The Jakarta Post, 2023)
Hydrography
The recent advancements in underwater robotic technology have revolutionized the field of underwater exploration, providing significant enhancements to human capabilities. Unlike terrestrial environments, where electromagnetic waves and optical rays can be utilized for mapping and localization purposes, underwater operations present unique challenges. These challenges arise from the limitations imposed by the high attenuation rate of electromagnetic and optical technologies in aquatic settings. Consequently, shipborne systems have traditionally served as the primary means of conducting engineering operations and exploratory missions above the sea surface. The reliance on these systems, along with the application of satellite-based Global Navigation Satellite Systems (GNSS) and aerial photography using aircraft, drones, and satellites, has facilitated large-scale mapping and localization efforts for terrestrial areas. This comprehensive mapping coverage stands in stark contrast to the oceans, which remain largely uncharted, unobserved, and unexplored, accounting for over 80% of the Earth’s marine environment (NOAA, 2023).
Unlike navigation on land, where visible objects on the road aid in self-navigation, sailors at sea rely on nautical charts, which serve as seafloor maps. These charts possess universal characteristics, as they are essential not only for local navigation but also for intercontinental voyages. Hydrography, as a field of study, plays a vital role in providing accurate and detailed seafloor mapping and charting information necessary for safe navigation in the marine environment. When venturing into the depths of the ocean, hydrographic considerations become even more crucial due to the unique conditions and challenges posed by the deep-sea environment. Factors such as extreme water pressure, low visibility, complex underwater topography, and varying water properties necessitate a comprehensive understanding of hydrographic principles to ensure the safety and effectiveness of deep-sea exploration missions.
From a hydrographic perspective, it is essential to examine the factors that may have contributed to the recent incident involving The Titan Sub and identify potential areas of improvement to mitigate risks and enhance future deep-sea exploration endeavors. Hydrographic surveyors, in pursuit of these objectives, extensively utilize acoustic technology, encompassing navigation aids, feature detection mechanisms, and mapping techniques. Acoustic technology is favored due to its ability to mitigate the limitations of electromagnetic and optical technologies in underwater environments, where they encounter significant attenuation underwater. The acoustic technology propagates its wave through water column which may degrade its accuracy in parallel with depth. The underwater robotic technology in hydrography helps to bring the sensor closer to object so that the resolution (of the map) can be maintained.
Instruments
The Titan Sub is submersible vehicle similar to Autonomous Underwater Vehicle (AUV) that is mainly used for research purposes. The AUV extends the flexibility where it doesn’t need a cable connected to the main ship or controller either on sea surface or on the shore for its exploration underwater as found in Robot Operated Vehicle (ROV). To ensure the navigation underwater, GNSS can no longer be used, the typical navigation sensors are acoustic positioning system (APS), inertial system, and integrated system consists of various sensors. The common APS namely Ultra Short BaseLine (USBL), Short BaseLine (SBL), and Long BaseLine (LBL) requires extensive procedure to operate where the transponder arrays with known coordinates connected to global position shall be known previously (see Figure 3).
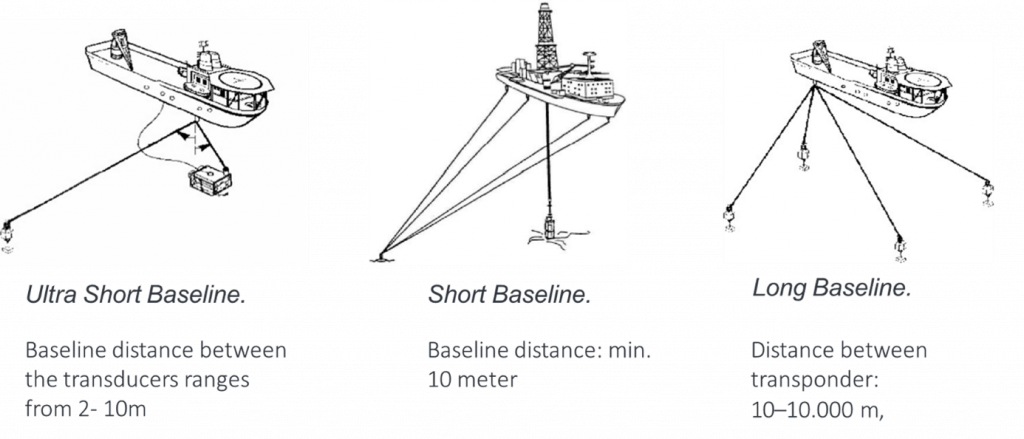
Figure 3. Illustration of Acoustic Positioning System (APS) underwater (Hydrography Research Group ITB, 2022).
The differences between these systems are the baseline used for determining underwater position. In summary, USBL systems provide real-time positioning with moderate accuracy for short distance and smaller area coverage, SBL systems enhance accuracy by using multiple transceivers, and LBL systems offer high accuracy over large underwater areas but are better suited for stationary or slow-moving targets. The choice of system depends on the specific application requirements, such as accuracy, real-time positioning needs, and the mobility of the assets involved.
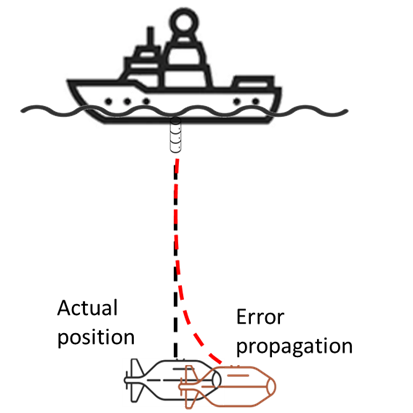
Figure 4. Illustration of USBL error propagation due to depth increases
Back to the Titan Sub, it mentioned that it uses the EvoLogics USBL system to ensure the safety of navigation underwater especially near the R.M.S. Titan wreck and debris (OceanGate, n.d.). It is understood that the USBL systems possess the advantage of eliminating the need for a sea floor transponder array, yet they exhibit inferior positioning accuracy and robustness compared to LBL systems. This discrepancy can be attributed to the fixed angle resolution inherent in USBL systems, which results in a magnified positional error as the distance between the transceiver and target increases as seen in Figure 4. Additionally, the incorporation of multiple sensors for USBL may be needed for highly dynamic ocean with strong currents and waves. Most USBL has standard accuracy of 0.5 % slant range which means 17.5 m positional error at depth of 2.000 m as shown in Figure 5.
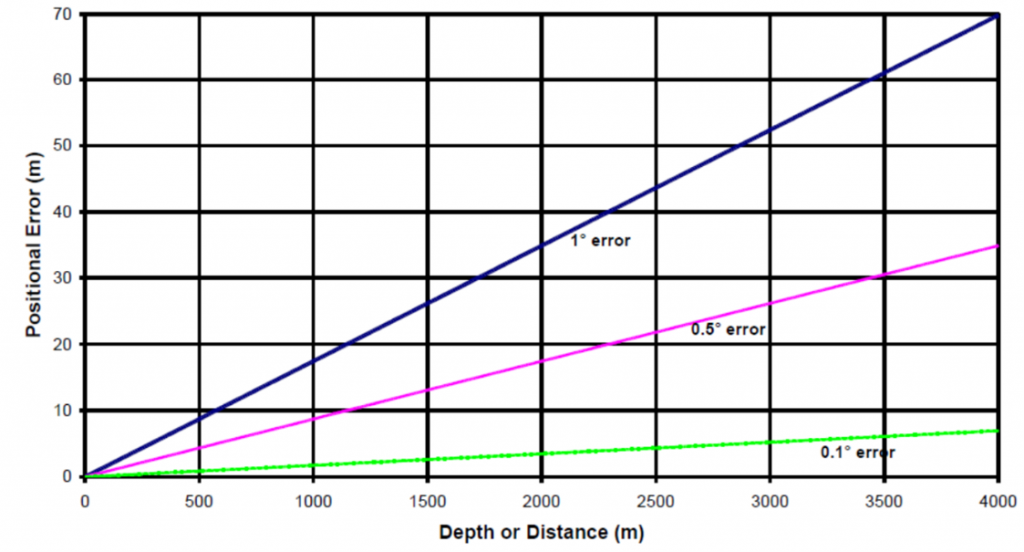
Figure 5. Error propagation in USBL (West, 2023)
A comparative analysis between Ultra-Short Baseline (USBL) and Long Baseline (LBL) positioning systems was conducted by Zhang et al. (2019), revealing noteworthy findings. According to their study, USBL exhibited a horizontal positioning error of approximately 200 meters at a depth of 5,000 meters, as illustrated in Figure 6. This research sheds light on the performance characteristics and limitations of USBL technology in deep-sea environments. Moreover, it is important to consider that additional errors can arise from the integration of other sensors into the USBL system, such as pressure and inertial sensors. These additional sensors have the potential to further degrade the overall positioning accuracy.
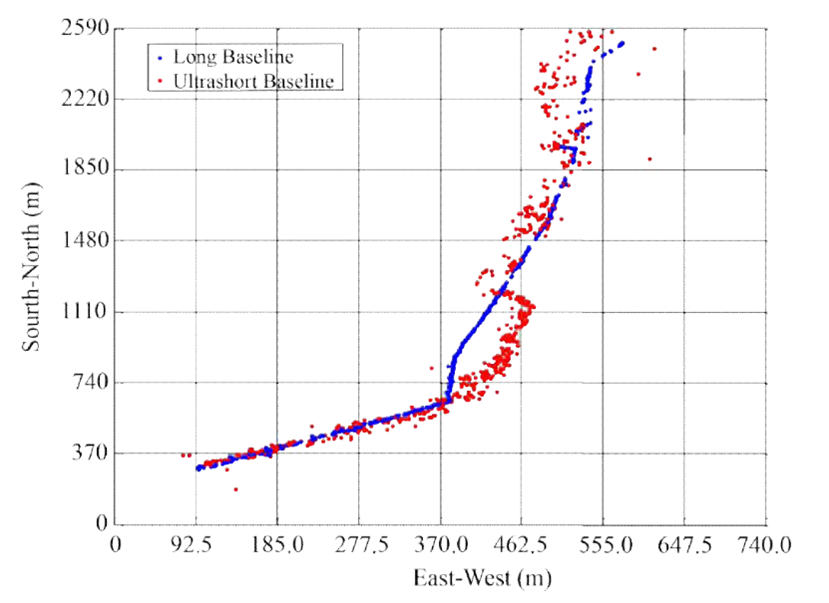
Figure 6. LBL vs USBL (Zhang et al., 2019)
It is also mentioned that the Titan is equipped with four 10 hp electric thrusters for maneuvering and capable of travelling speeds of up to 3 knots equal to 5.6 km/h. It is understandable that diving with high speed will increase the risk of its vehicle adaptations due to the water properties changes. Figure 7 illustrates the water column temperature in Newfoundland shore located circa 500 km away from R.M.S. Titanic wreck Additionally, it is important to consider the presence of internal waves and currents arising from the stratification of water column layers. These internal waves can potentially impact the movement of the Titan submersible, as sudden wave events may propel the submersible beyond the range of the USBL positioning system. Consequently, such instances can lead to a loss of underwater positioning accuracy. Furthermore, the movement of the submersible across distinct density layers can introduce sudden changes in water properties, thus posing a risk of compromising the submersible’s stability and potentially resulting in submersible explosion. The combined influence of internal waves, currents, and density layer transitions necessitates careful consideration and management to ensure the safe and accurate operation of the Titan submersible.

Figure 7. Temperature anomaly in Newfoundland shore (Colbourne et al., 2027)
Future
In conclusion, the implementation of robust quality control and assurance measures is of paramount importance in any ocean-related endeavor to ensure safety. From a hydrographic perspective, in addition to employing appropriate material engineering practices, the selection of hydrographic data, including the positioning system, must be carefully considered based on the specific area and project requirements. Moreover, critical attention should be given to bathymetric-related data, such as the availability of nautical charts, wave and current data, and water properties data at the site. If these essential data sets are lacking, it is highly recommended to meticulously plan data acquisition efforts and prioritize the collection of up-to-date bathymetric-related data. By doing so, potential outcomes and challenges during the project can be more accurately predicted and addressed.
References
Colbourne, E., Holden, J., Snook, S., Han, G., Lewis, S., Senciall, D., Bailey, W., Higdon, J., & Chen, N. (2027). Physical oceanographic conditions on the Newfoundland and Labrador shelf during 2021. DFO Can. Sci. Advis. Sec. Res. Doc. 2022/040., June, v + 50.
Hydrography Research Group ITB. (2022). H1- Positioning.
NOAA. (2023). How much of the ocean have we explored? National Ocean Service Website. https://oceanservice.noaa.gov/facts/exploration.html
OceanGate. (n.d.). Titan: 5-Person Submersible- 4000 meters.
OceanGate. (2023). OceanGate Expedition, Ltd’s Titanic Expedition. Legal Document No 683,Case 2:94-Cv-009_RBS. https://www.wavy.com/wp-content/uploads/sites/3/2023/06/Svanorof1pr23062221260.pdf
The Guardian. (2023). Missing Titanic submersible : what is the Titan tourist sub and what might have happened to it ? The Guardian. https://www.theguardian.com/uk-news/2023/jun/20/missing-titanic-sub-titan-submersible-tourist-oceangate-what-is-it-and-what-might-have-happened
The Jakarta Post. (2023). Titan sub: What is a “catastrophic implosion”? The Jakarta Post. https://www.thejakartapost.com/culture/2023/06/23/titan-sub-what-is-a-catastrophic-implosion.html
West, G. (2023). Optimising Ultra-Short BaseLine ( USBL ) Positioning from Research Vessels.
Zhang, T., Han, G., Yan, L., Liu, B., & Shu, L. (2019). Optimal Design of Beacon Array for Long Baseline Positioning System Used in Manned Deep-Sea Submersibles. IEEE Access, 7, 140411–140420. https://doi.org/10.1109/ACCESS.2019.2943617