Written by: Fickrie Muhammad
Underwater robotics have greatly improved marine science and technology, making ocean exploration and offshore inspections much easier. These robots are essential for tasks like checking ship hulls and finding structural damage or simply ocean mapping. Autonomous underwater vehicles (AUVs) equipped with advanced sensors are key for mapping the ocean floor and inspecting underwater structures. To navigate, especially near underwater structures, precise location tracking is crucial, and methods like acoustic or inertial navigation are used in open ocean settings. However, using inertial sensors for long trips can be tricky because small errors can build up over time.
Optical methods are helpful in complex underwater areas because they reduce the need for noisy acoustic sensors. Vision-based Mapping (VbM) methods, like Structure from Motion (SfM), Simultaneous Localization and Mapping (SLAM), and Visual Odometry (VO), are used to create maps and figure out where cameras are located. SLAM is especially useful when taking a series of images for navigation underwater. Before creating 3D maps, VbM estimates the depth of features using different methods, such as comparing camera positions or looking at image features. However, underwater environments create some challenges. For example, light scattering and absorption in water can lower image quality. Lighting changes can also cause objects to be missed or misinterpreted, making navigation harder. To improve image accuracy, techniques like spatial filtering and backscatter removal are used. Additionally, underwater cameras are usually placed in protective enclosures that can distort light, making images less clear. Light passing through water, glass, and air can cause refraction, which can distort images.
Dome ports are better for reducing this distortion, while flat ports tend to bend light. This research uses physics to model and correct how light travels, ensuring more accurate underwater measurements. Special calibration techniques help fix these problems and improve the accuracy of underwater images. In the flat port glass, rays’ transmission is deflected after passing each medium layer in detecting underwater point P towards the glass panel, which creates a 3D point pg and pa in the glass and air mediums, respectively, then directly projected to the camera scene as 2D point p by using known intrinsic parameters. The incident angle in each medium is then correlated with Snell’s law as
μi sinθi = μi+1 sinθi+1, where μ is the refraction indices of medium layer (μa, μw, μg), θ is the incident angle between refraction axis (β, γ, δ), and optical axis n (normal vector). From Snell’s Law, the ray transmission is then correlated with the focal length f, the distance between each medium d, and the total medium distance l.
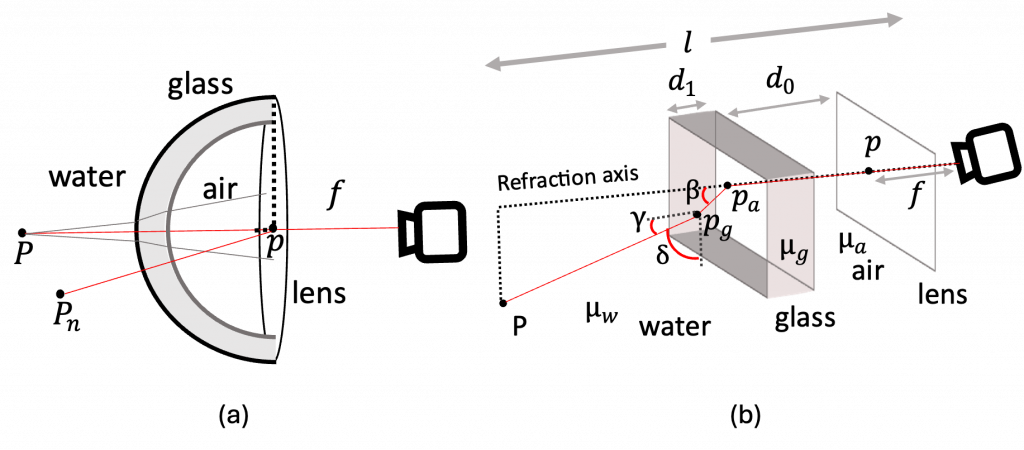
Figure 1. Illustration of ray’s refraction in underwater camera setup: in (a) dome port and (b) flat port glass.
This research improves underwater image quality by removing backscatter and correcting refraction distortion using a pinhole-axial (Pinax) camera model. The methods are implemented in the Robot Operating System (ROS), allowing real-time image enhancement and easy integration into the Vision-based Mapping (VbM) pipeline. The proposed models aim to improve how underwater features are detected and tracked as the camera moves. To test their effectiveness, simulation datasets as illustrated in Figure 2 were created to assess how the methods perform under different turbidity levels. Field tests with GoPro 10 cameras in the waters around Pramuka Island, Indonesia, provide real-world data to support the study. Additional visual-inertial datasets are used to measure overall performance, especially for providing accurate position data.
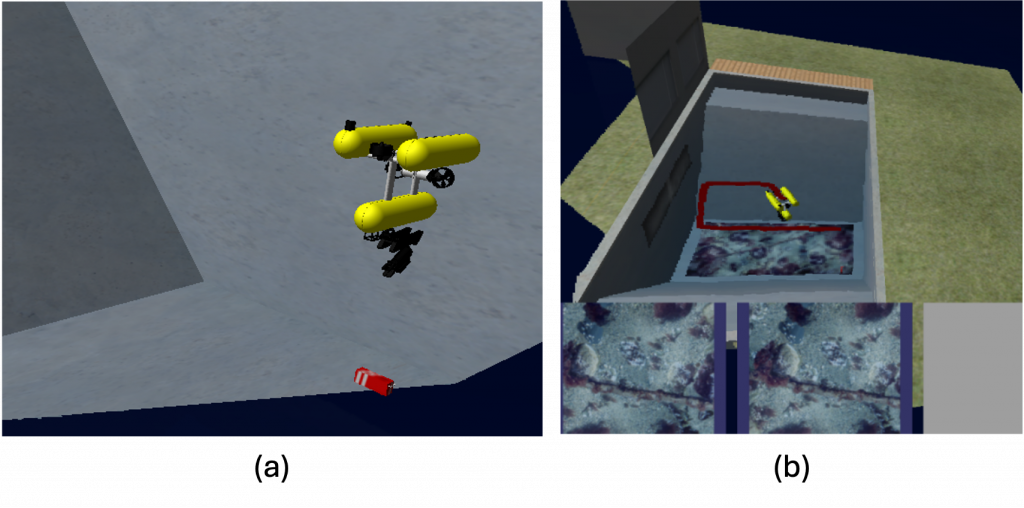
Figure 2.Simulation of the controlled environment setup: (a) the Girona 500 AUV positioned above the black box, (b) the trajectory of the AUV simulation navigating within the water tank (the seabed is constructed from a photo mosaic. Hence the range camera indicates a flat surface).
The results show that removing backscatter helps improve feature detection, particularly in murky waters, while correcting refraction reduces errors leading to bowing effect (Figure 3) caused by missing reference points underwater. The study highlights the importance of image enhancement and refraction correction to achieve less than 4% trajectory error in VbM. Overall, the new VbM pipeline reduces trajectory errors to under 5 cm, compared to the standard pipeline. The findings underline the need for a thorough approach to improve underwater mapping and navigation for more accurate and reliable results in various underwater conditions.
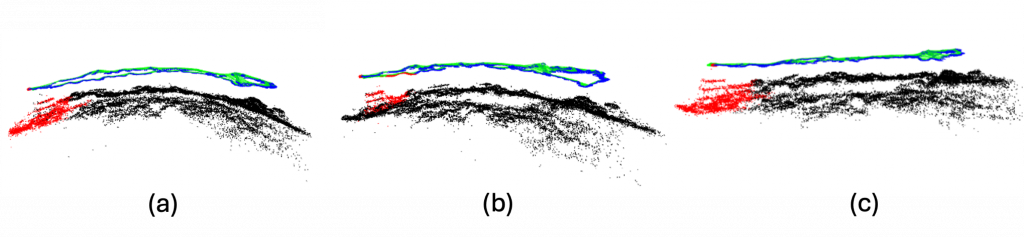
Figure 3. Trajectory output and seabed mapping in the coral field experiment from a different setting of calibration of: (a)In air calibration (b) Underwater calibration (c) Pinax calibration.
Full article: https://doi.org/10.1016/j.iswa.2025.200476